drones
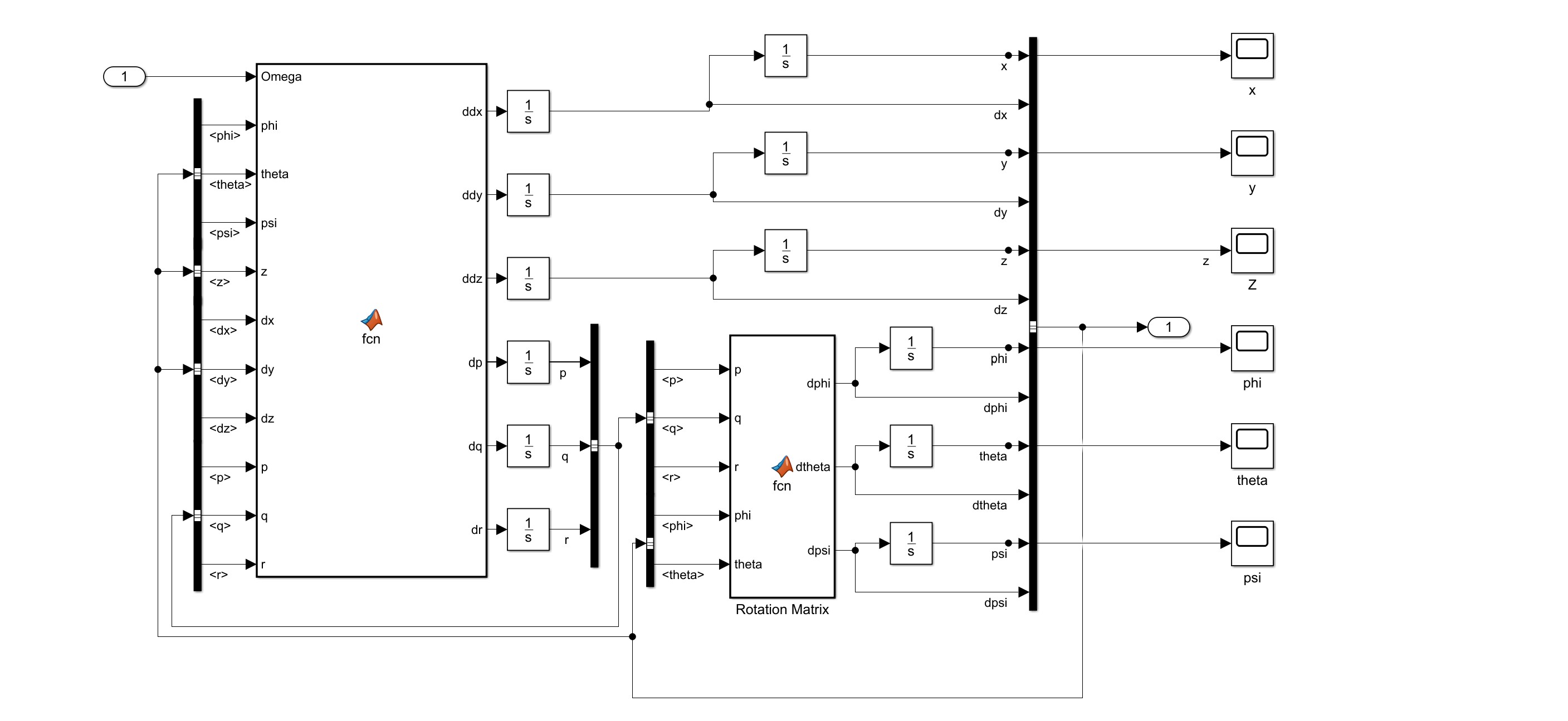
I used Simulink to study Quadcopter dynamics and different controller designs
Project
I used Simulink to create a model of a simple quadcopter and then used that model to study the efficacy of various different controllers.
One specific behavior I was studying was the control inputs necessary to have a drone do a flip and understand what sort of flight path and motor inputs create the fastest, tightest, or most stable maneuver.
The eventual goal of the research is to design a controller that can detect an incoming flying object, and then avoid this object autonomously by flying out of it’s way.