Infrared Receiver Project
I designed the assembly around an infrared receiver to improve robot docking
Robotics Advanced Development team, Mechanical Engineering Co-op
I had the pleasure of working on the Robotics Advanced Development team at Shark Ninja working on the Fall 2020 line of autonomous robot vacuums. Due to a unique management structure, I had the opportunity and the responsibility to determine the projects and the tasks that would be most useful to the team and it’s long term goals.
Infrared Receiver Project
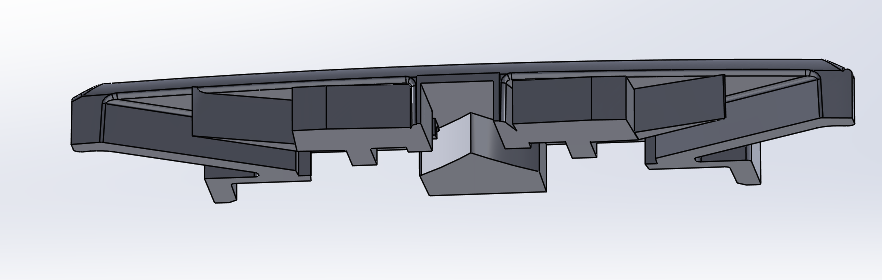

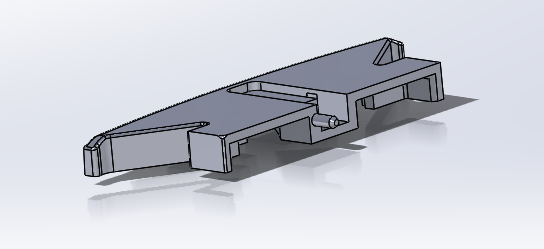
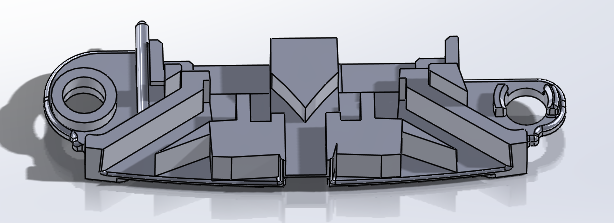
Here, I designed a mirrored surface in the IR receiver housing that would split a small beam of light and direct it to two sensors. I used MATLAB to model the surface necessary to hit the IR receivers and then used a parametrization tool in SolidWorks to create the necessary mirrored surface. This would have improved the accuracy of the docking guidance system and result in improved docking performance.